The research team led by Professor Jun Liu from the Department of Data and Systems Engineering at the University of Hong Kong has published their latest findings in Nature Communications. The paper titled “Magnetically actuated momentum-driven millirobots” (DOI: 10.1038/s41467-025-67936-6) introduces an innovative near-field driven magnetic microrobot weighing only 5.8 g. This new miniature robot can generate instantaneous thrust over 15 N, enabling stable traversal of various high-resistance terrains even under heavy loads.
Microrobots have significant implications in confined spaces, such as biomedical diagnosis and treatment, underground exploration, narrow pipeline inspection, and post-disaster search and rescue. In recent years, researchers have focused on optimizing miniature robots. However, constrained by the design limitations, existing microrobots struggle to integrate complex transmission components, leading to bottlenecks in small force output. Previous microrobots cannot achieve heavy-load transport or navigate high-resistance environments, severely restricting the implementation and real-world impact.
Traditional magnetically controlled microrobots typically rely on large Helmholtz coils to generate external magnetic fields. Due to the rapid decay of magnetic force with distance, external magnetic systems suffer from limited working space, low force output, and insufficient load capacity. To address these challenges, Professor Liu’s group introduces a magnetically inner-actuated design for the first time, integrating electromagnetic coils and a permanent magnet inside the robot to create a self-contained actuation system. This design completely eliminates the working space restrictions of magnetically controlled microrobots and effectively resolves the bottleneck of low load capacity, achieving high mobility with loads exceeding 300 times the robot’s own weight. This result significantly surpasses the current load-to-weight ratio limits for miniature robots.
The following images illustrate the magnetically internal-driven millirobot, working sequences, and the comparison with previous studies.
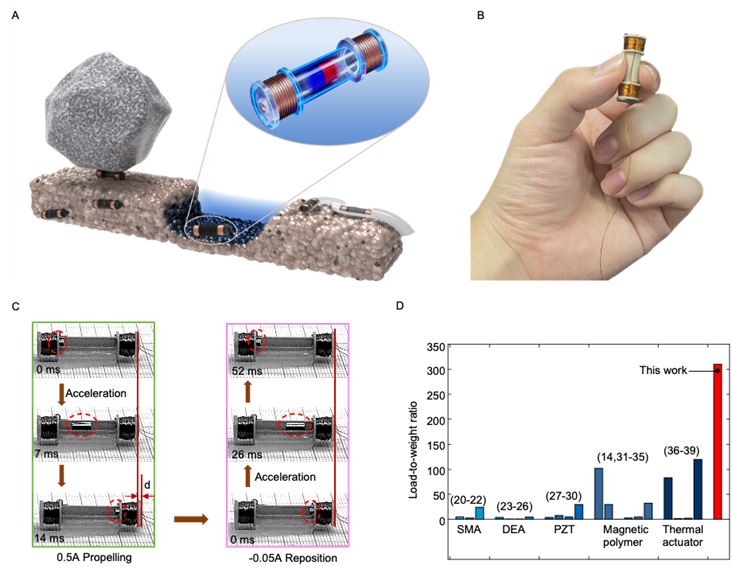
This microrobot features a compact design (∅12 mm × 32 mm), with a plastic shell, a cylindrical NdFeB permanent magnet embedded in the central channel, and dual electromagnetic coil arrays symmetrically arranged at both ends. Under 0.5 A current drive, internal magnetic interactions accelerate the permanent magnet to 2.10 m/s within 17 ms, striking the end wall to generate powerful instantaneous thrust, propelling the robot via the principle of momentum conservation. Experiments show that the new microrobot can smoothly advance in viscous oil, traverse sand and granular media, while demonstrating potential for entering confined pipeline environments. Additionally, the team has overcome challenges in efficient steering control and vision-free positioning for the robot, providing a new paradigm for innovation in miniature robot drive technology. The results are expected to enable scaled applications in confined space operation scenarios with stringent output force requirements.
Professor Jun Liu from the Department of Data and Systems Engineering at the University of Hong Kong stated: “Through near-field magnetic design and momentum impact mechanisms, we have successfully resolved the contradiction between miniaturization and high force output in miniature robots. This simple and efficient design significantly enhances the robot’s adaptability in complex high-resistance environments, and we look forward to its diverse applications in engineering and medical fields.” The full paper is available at: https://www.nature.com/articles/s41467-025-67936-6
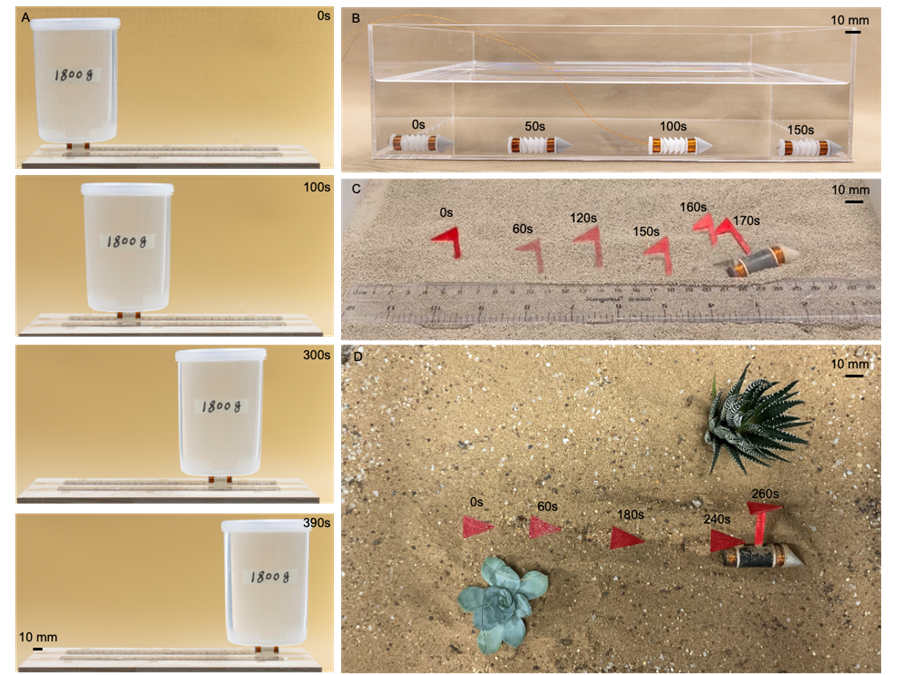
The new miniature robot can be used in a wide range of applications, including heavy-load transport, propulsion in viscous liquids, traversal of granular media, and subterranean navigation.
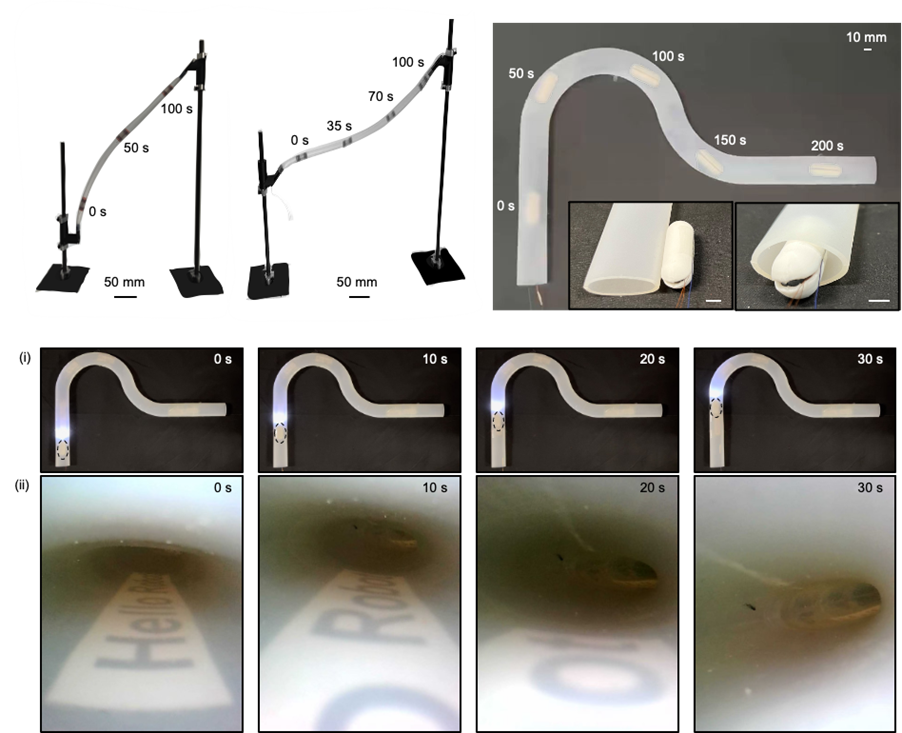
Magnetically actuated momentum-driven millirobots are capable of navigating confined tubular environments for inspection tasks and hold significant potential for industrial and medical applications.